什么是自适应巡航
简称是ACC,其实是定速巡航进化过来的。定速巡航就一个劲,你设定80码跑它就80码跑。
而自适应巡航是可以根据前面车子的速度快慢,做出反应,来加减速的。
就跟车了,就不用经常刹车、油门来回踩了,就省下不少的力气。
全速域自适应巡航又和自适应巡航有什么区别呢?其实这只是科技进步路上所经历的一个小小阶段,在相关软硬件没有跟上的时候,很多车辆的自适应巡航功能并不能做到全速域开启。
例如很多车辆的自动巡航功能只有在达到20或者30公里每小时以上的速度的时候才能启用,而在这个速度以下的时候系统则无法工作,此时车辆的控制权是被完全交还给驾驶者的。
换句话来说,如果前方车辆直接刹停,搭载了非全速域自适应巡航的车辆会在车辆减速到一定 程度后将车辆控制权交还给驾驶者,由驾驶者完全刹停,而搭载了全速域自适应巡航的车辆则能将车辆完全刹停。
此外,起步也是同样的道理,搭载了非全速域自适应巡航的车辆在起步的时候是没有办法靠系统自动完成的,只有驾驶者在将车辆加速到其要求的速度之后才能启用自适应巡航功能。
而搭载了全速域自适应巡航功能的车型则可以在前车起步之后自动跟车前进,当然,出于安全的考虑,绝大多数搭载了全速域自适应巡航的车型在距离上一次刹停超过3秒之后,再次起步之前都需要驾驶者按一下恢复按钮或者踩一下油门,以免在驾驶者没有做好准备的情况下突然起步从而造成事故。
普通自适应巡航对于能够开启巡航的最低车速有要求,只有汽车先跑起来,在大于这个车速的时候,驾驶员才能开启巡航。有的厂家是25km/h,有的厂家是30km/h,不一而足,但是并没有本质的区别。
如果在高速上跑,那普通自适应巡航完全没问题。
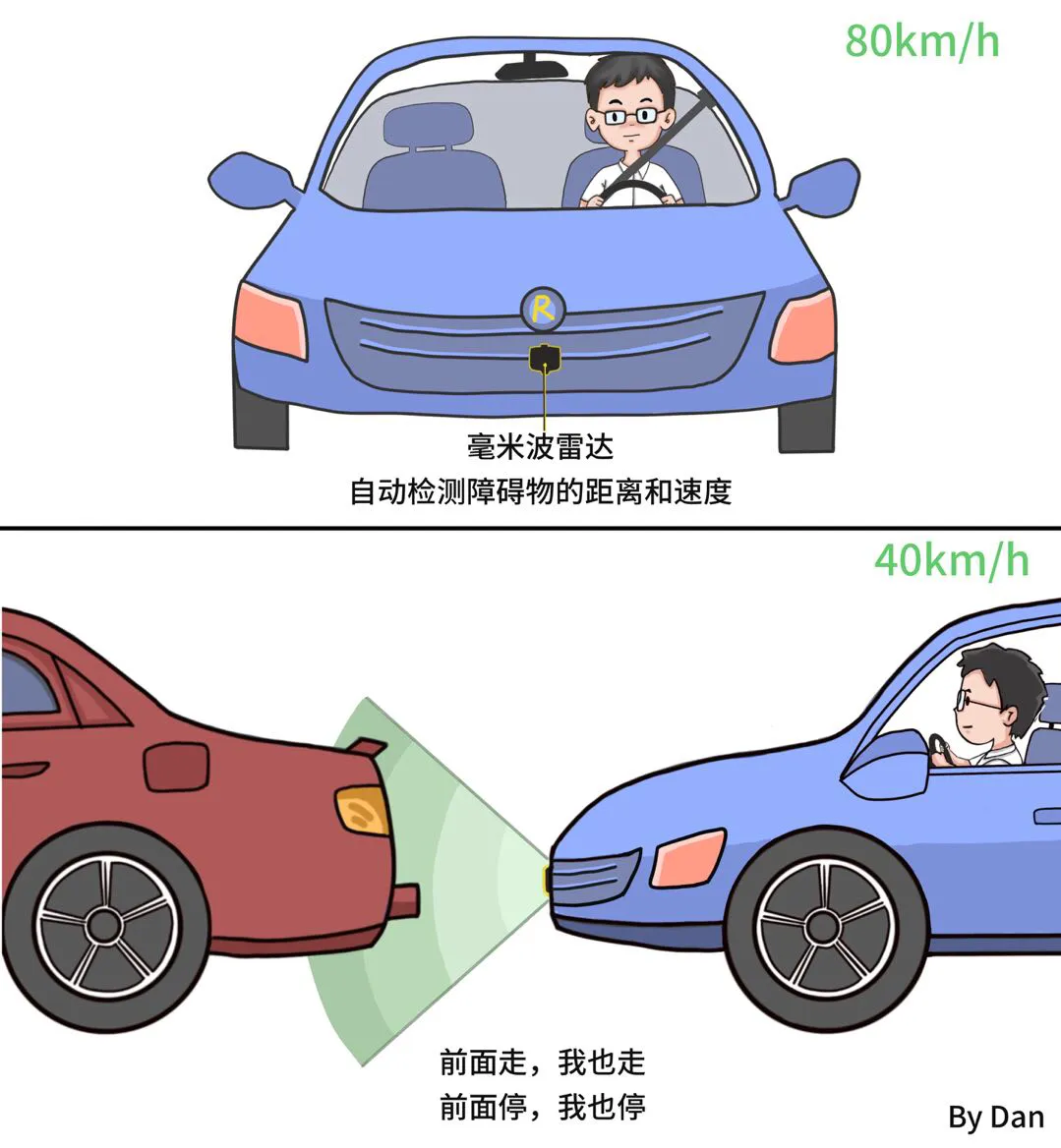
但是换一个场景,在城市里路上大堵车。前面车走走停停,自己开车也得频繁在刹车和油门之间来回切换。这时候如果能让车自动跟着前车,前车走自己走,前车停自己停,可以大大缓解驾驶员的压力。这就是全速自适应巡航,又叫走-停型自适应巡航




